Getting a Grip will develop smart anchoring modules that can be integrated into robots to enhance their abilities for mobility and manipulation in unstructured environments. The module adapts effective methods to interact with the environment taking into account its properties, living and non-living contents.

At a glance
The purpose of the fellowship is to:
- Enable world-leading innovation in mobile robotics, leading to new insights in the science of how robots may attach themselves to the environments where they are deployed.
- The creation of a specialist centre of cross-disciplinary expertise.
- The development of working prototypes for practical application, and pathways to commercial exploitation.
- This research will exemplify what can be achieved by combining scientific and technological exploration with design.
Key details
More information
The challenge
People who need to work at height, underground or in hazardous locations have higher health risks due to falling, exposures to toxic chemicals and radiation or other aspects of their work. To avoid these problems, mobile robotic manipulation technologies have allowed humans to operate remotely without exposure to hazardous environments, to reduce or entirely eliminate health and safety risks and enable a more acceptable work place. However, their applications are currently restricted due to a number of mobility (reaching to location) and functionality (acting in location) issues; the mobility mechanisms are typically designed for predefined environments while in reality a robot should interact with and navigate through an unstructured and often cluttered environment; existing robots are comprised of heavy and rigid components that can damage the surrounding environment and injure human workers; effective functionality of the robotic system at the location requires appropriate positioning and stability of the mobile manipulation platform during the mission.
Our approach
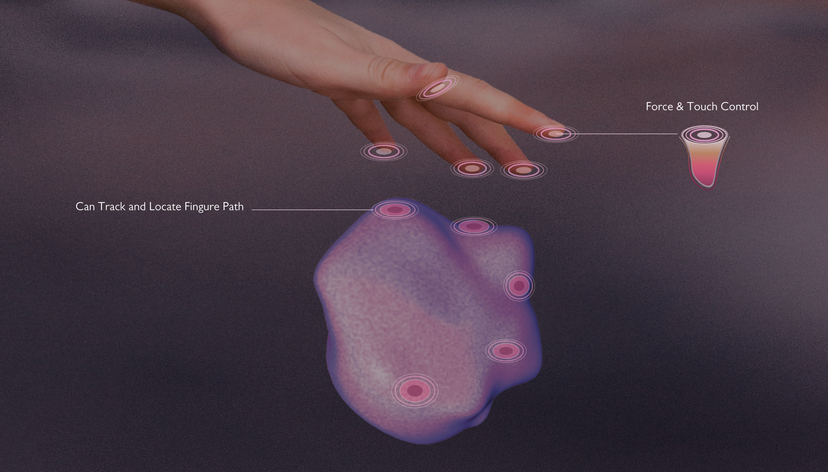
An effective solution to these problems is to implement an interfacing layer between robots and environments that can enable physical attachment and provide live information on the state of interactions between the robot and its surroundings. Important recent work in robotic technologies for anchoring is inspired by animals and plants which have evolved effective solutions to various problems including locomotion, object manipulation, standing against fluid flows and energy management.
The emergence of advanced soft composite materials, manufacturing and communication technologies allows making robot components with properties and functionalities that were not possible in the past; most prominently our new abilities in creating components with a mechanical stiffness spectrum, e.g. similar to the structure of bones, muscles and skin in human body where a transition from rigid to soft is evident; and stiffness variability, e.g. similar to the ability of octopus in adjusting their arms' stiffness. These advances are being exploited to make anchoring systems that can interact with the environment in a safer and more effective way.
Outputs
Sareh, S., Althoefer, K., Li, M., Noh, Y., Tramacere, F., Sareh, P., Mazzolai, B., Kovac, M. (2017) Anchoring like octopus: biologically inspired soft artificial sucker, Journal of the Royal Society Interface, 14:135.


Ask a question
Get in touch to find out more about our research projects.
sina.sareh@rca.ac.uk